
当前位置:首页 > 产品中心























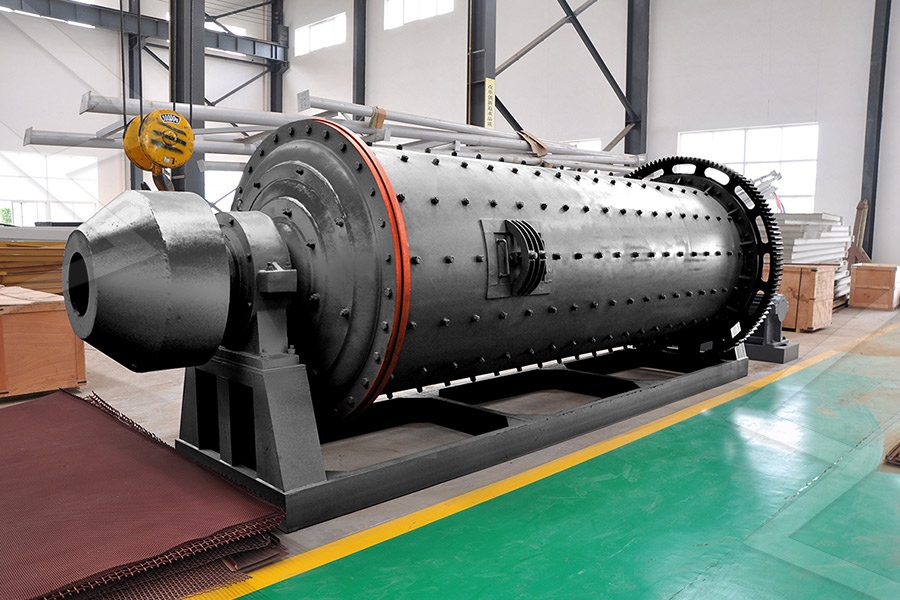



















水嚰机器
46.jpg)
滗水器 百度百科
滗水器又称滗析器,是SBR工艺中最关键的机械设备之一。可以分为虹吸式滗水器 、旋转滗水器、自浮式滗水器、机械式滗水器,在国内应用广泛的多为旋转式(属机械式滗水器的一种)。2021年9月13日 — 研究人员从自然界的水黾中获得灵感,开展了超疏水材料制备及机器人多场联合驱动的研究,结合聚二甲基硅氧烷、石墨烯、磁性颗粒,制备了具有光相应、磁响 【中国科学报】沈阳自动化所仿水黾微型机器人问世2024年6月29日 — 在火灾发生时,人们不再需要费力地用桶舀水,而是可以利用水铳这一高效工具,迅速地将水喷洒到火源上,有效地控制火势。 这种预见性和实用性,让人不得不 古人的智慧结晶——水铳:揭秘明清时期的消防神器 明代的 2022年6月8日 — 水碓,又称机碓、水捣器、翻车碓、斗碓或鼓碓水碓,旧时汉族农用器具。流行于中国多数地区。一种借水力舂米的工具。是脚踏碓机械化的结果。水碓 搜狗百科
.jpg)
研究人员打造出可以依靠表面张力及异丙醇运动的机器人水黾
2021年10月21日 — 水黾通过分泌称为脂质的不溶于水的化合物来利用它,以此来创造一种表面张力的不平衡,然后拉动它们前进。 在Hassan Masoud助理教授的领导下,密歇根技 2024年2月22日 — 华盛顿州立大学研制的两种昆虫机器人 迷你虫和水黾,是迄今已知最小、最轻、最快的全功能微型机器人。 这种微型机器人有朝一日可用于人工授粉、搜救、环 科学家创造出世界上最小、最轻、最快的全功能微型水黾机器人仿生水黾机器人是基于水黾生物能够在水面上漂浮和滑行的基本原理,模仿水黾腿的疏水特性,能够实现在远程水域等环境独立自主作业。 目前国内外对仿生水黾机器人的研究还停留 仿生水黾机器人的研究 百度学术2021年9月14日 — 中科院沈阳自动化所在微型机器人领域取得新进展,研发的仿水黾微型机器人可在红外光与磁场的联合驱动下,实现可编程多模态运动,在微型机器 仿水黾微型机器人研究取得新进展经济科技人民网
.jpg)
中国水力机械发现丝绸之路的智慧中国数字科技馆
2019年12月20日 — 连机水碓:水碓是以水为动力的一种谷物加工机械,在西汉末年便已出现。 水转连磨 :以水力驱动的粮食加工机械。 通过流水冲击立轮,带动轮轴上的三个齿轮,各自连动三台石磨进行谷物加工,俗称“九 2024年5月30日 — 水下机器人技术 的发展使机器能够在深海和极端环境中工作,为人类探索以前无法到达的领域提供了可能。 最近关于由 人工肌肉驱动的机器人 的研究展示了其在 静音、效率和适应性 方面的优势。 虽然已 CRPS封面文章!浙大李铁风团队无线水下软体机器 2023年4月17日 — 为解决微型机器人在较小机身尺寸下实现高效轨迹控制的难题,设计并研制了微型仿水母机器人JRT,其由气室、重心调整机构和仿水母推进器三部分组成,尺寸仅为⌀68 cm×53 cm,可通过重心调整机构和仿水母推进器协同控制有效实现水下轨迹可控水下实验验证了机器人JRT沿竖直方向游泳和悬停、水平 轨迹可控的微型水母机器人研制 SJTU2023年4月27日 — 这种运动不仅可以让机器水母在水中前进,还可以在水母周围产生水流,将海底的小颗粒物吸上来,可用于清除珊瑚礁等脆弱海洋环境中的垃圾。 科学家们说,这种机器水母模仿了真正的水母的运动方式,自然界里的水母也是通过拍动来捕捉食物和获取营养物 海洋清洁利器:仿生机器水母不用碰触垃圾就能吸走它们 IT之家

北航“鱿鱼机器人”、德国“水母机器人” 知乎专栏
2021年8月9日 — 1北航、瑞士联邦理工联手开发了一款“鱿鱼机器人” 据IEEE Spectrum报道,最新消息,在机器人技术领域最有影响力的ICRA国际会议上,来自北京航空航天大学研究团队和瑞士联邦理工学院的两篇仿生机器人论文吸引了科2023年8月30日 — 想要 10 搭建自己的 maimai 机器人?现在就参考开源项目 maibot 吧~ 请开发者打一局 maimai 如何?帮助我们发发电好不好嘛~ 迁移了数据库以加快网站的响应速度及后续开发。如遇任何无法导入成绩或出错的情况,请及时添加讨论群进行反馈。舞萌 DX 中二节奏查分器 DivingFish2016年7月12日 — 仿生水母机器人在水 中通过调节配重块的质量使重力与浮力相等,使仿生水母机器人一直处于悬浮状态,故在动力学分析中,忽略重力与浮力。对于仿生水母机器人,在游动的过程中,在水中主要受到力主要分为四部分:推进力 仿生水母机器人SMA驱动技术及试验研究2020年4月17日 — 该机器人除了可用于军事监视外,未来还可用于水下快速救援、海底探测、资源勘探、水下地形勘测等方面。 相比于传统刚性机器人,软体机器人一般采用可变性较大的柔性材料制成,可以实现大尺度连续变形,并任意改变自身的尺寸和形状。工业之美|仿生界又出黑科技,这是垂直上升速度最快的水母
.jpg)
CRPS封面文章!浙大李铁风团队无线水下软体机器人 百家号
2024年5月30日 — 因此,具有快速驱动和便携电源系统的多功能且适应水 环境的软体人工肌肉是高度需求的。介电弹性体(DEs) 在李铁风团队最近的工作中表现出了快速的水下电响应速度。然而,这些材料的实际应用仍然存在一些局限性。首先,要求刚性框架将 2019年7月2日 — 研究表明,该机器人能够操控其周围的水流动,完成一系列任务。 图1:受水母启发的微型机器人的设计及游泳行为 图源:Ren等 游泳机器人具有生物 多功能水母机器人 《自然通讯》 科学网2023年11月14日 — 这款仿生水母机器人利用不同的运动控制策略实现水母机器人的半潜和全潜游动,实现在海洋牧场中的低能耗、长时间巡航。 集成多种海洋生态监测传感器于水母机器人上,发展多传感器信号交叉干扰抑制技术,优化水母机器人的巡航轨迹,可以灵活自如地对海洋牧场的养殖环境进行监测。华侨大学研发的仿生水母机器人在厦门海洋科技成果转化洽谈 本论文研究来自于国家863项目"低电压驱动水中多功能微型仿生机器人系统研究"。 论文以水母为仿生对象,通过对水母的观察和仿生研究,提出并研制了一种仿水母式机器人。 设计了基于SMA和ICPF联合驱动的仿水母水下微机器人的本体结构;在运动机理分析和 一种仿水母式机器人的研究 百度学术
.jpg)
深度解析:国内水下机器人现状及未来发展方向 知乎
2020年1月10日 — 水下机器人是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。水下机器人主要运用在海上救援,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重 2022年11月1日 — 该论文报道了仿生水凝胶水母(HABH jellyfish)的相关研究成果,为研发新型仿生水凝胶机器 人提供了重要参考。传统水下机器人一般由刚性材料制成,其声阻抗与水不匹配,是强的声散射体。同时,这些'''''硬'''''机器人运动灵活性 厦门大学张宇教授团队在Cell旗下期刊发表仿生水凝胶水母 2020年3月13日 — 2、本文内容概述 仿生水下机器人和水下滑 翔机的运动控制理论较常规水下机器人更为复杂,由 于笔者知识水平和能力有限, 故木文不涉及仿牛水母机器人的运动控制,不做 仿生水母机器人的水动力学建模及 水中运动状态下的受力分析。开题报告仿生水母机器人设计 豆丁网2021年11月26日 — 水母机器人的水动力学建模及水中运动状态下的受力分析。 本文的设计目标 是:1、仿生水母机器人工作在极限水深时密封壳体不泄露,不损坏,且浮力驱动器 能正常运作;2、当柔性体腔推进系统的伺服舵机输出最大扭矩时,传动链上的每个 毕业论文仿生水母机器人 毕业设计(附件)doc 豆丁网

福建科普原创 仿生黑科技,这个水母机器人有点意思研究
2019年10月25日 — 无缆软体水母机器人 2019年7月份,德国科学家团队报告了一种以 钵水母碟状幼体 为灵感的无缆软体机器人,它仅有几毫米大小,却具备 运输和钻挖 等多种功能。研究表明,该机器人能够操控其周围的水流动,完成一系列任务。仿生水母机器人由6组SMA驱动模块辐射对称组装构成,采用了基于中枢模式发生器(CPG)网络的仿生控制方式,实现了水母机器人三维空间内多模式游动。最后,针对水母机器人不同的运动模式进行了多组实验,水母机器人游动数据验证了控制模型的有效性。基于SMA驱动模块的仿生水母机器人机械与电子 2017年9月25日 — 软体机器人(图9(b))。25 响应水 凝胶驱动 水凝胶是由亲水性的功能高分子,通过物理或化学作用 交联形成三维网络结构,吸水溶胀而形成 水下软体机器人柔性驱动方式及其水下软体机器人柔性驱动 2013年4月7日 — 那么,这种机器人在水中是如何运动的呢?研究人员介绍说,其内部有一个碗状刚性支架。刚性支架上安装了直流电动机,可以控制刚性支架外部包裹的人造硅胶层进行有规律摆动,以此来产生动力。 “Cyro的运动方式与真正的水母已经很相似了 “水母机器人”研发成功 可用于监测海洋环境泰伯网
.jpg)
毕业论文仿生水母机器人 豆丁网
2016年6月5日 — 另外,JellyfishB还拥有一套太阳能充电系统,当机器人电能不足时,浮力驱动器就会自动调节到最大浮力位置并利用电动推杆的自锁特性,不耗能地锁定在该位置,使水母机器人以头部朝上的姿态漂浮在水面上,直到获得足够电能,再潜入水中继续工作。2023年11月9日 — 图片来源:IEEE 随着她在提示中添加了具体细节,她得到的图像也更符合她对水母机器人的想象。对于图片 4、5 和 6,她给的提示包括:自给自足、生活在海底的未来派电动水母机器人,水或弹性玻璃状 我用 ChatGPT,造了一个「水母机器人」 知乎2021年3月3日 — 水母机器人展示了一种使用预应力聚合物改进软体机器人的新技术,使其游动性能更好,超过了真实水母。美国北卡罗莱纳州立大学和天普大学的研究人员近期发表在Advanced Materials Technologies杂志上一篇题为Leveraging Monostable and Bistable PreCurvedBilayer Actuators for HighPerformance Multitask Soft Robots的文章,介绍 游泳比水母更快的水母机器人 知乎2024年3月7日 — 2023年我们见证了扫地机器人的蓬勃发展,无数的博主介绍了各种扫地机器人,并且也有各种角度来各种姿势来测试扫地机器人。相信大家看到拖酱油地,用来开荒,已经见怪不怪,但是并没有人讲解一个问题,扫地机器人的自动上下水问题,解放双手的关键是 扫地机器人自动上下水这些坑,你踩了吗? 什么值得买
.jpg)
仿生水母机器人设计毕业论文docx全文可读
2018年9月13日 — 图17 CH6090D型防水舵机 本文内容概述 仿生水下机器人和水下滑翔机的运动控制理论较常规水下机器人更为复杂,由于笔者知识水平和能力有限,故本文仅设计仿生水母机器人基本的简单运动控制,不做仿生水母机器人的水动力学建模及水中运动状态下的 2019年7月9日 — 它们以每150次的速度跳动,类似于小水母的速度跳动,并通过帮助机器人在水 中前进的鳍状肢进行伸展。 在过往的水母状机器人的研究中,其他研究者的关注焦点主要是机器人的游动能力。除了游泳,他们的机器人也能选择性地运输 毫米级多功能水母机器人问世!未来可操作无创手术!软体2019年7月5日 — 图 机器人设计示意图(来源:该研究论文) 软体游泳机器人在医疗和改善水体环境等方面有着广阔的应用前景。虽然目前已有能够游泳的微型机器人设计,但是随着机器人尺寸的缩小,让机器人具备诸如操控物体等高级功能仍是一项不小的挑战,主要原因在于机器人可以搭载的组件的尺寸有限。首个毫米级机器水母诞生,未来或可在血管内“游泳” 知乎2024年9月11日 — 英国科学家周三公布了一款机器人,其设计灵感来源于水母的形状和微妙的水下运动,可以让它安全地探索濒危的珊瑚礁。 根据南安普顿大学和爱丁堡大学的研究团队发表在《科学机器人这款小型机器人模仿的是“自然界最高效的游泳者——金鱼海蜇",通常被称为普通水母。机器人“水母”保护濒危珊瑚礁

Science Advances:一种多功能的水母状机器人平台,用于
2023年4月16日 — 2 ) 研究人员还使用该平台演示了基于接触的对象操纵、流体混合、形状适应、转向、无线游泳以及两到三个机器人的协作。本研究介绍了一种多功能的类水母机器人平台,具有适用于不同应用的广泛功能。 参考文献2019年8月21日 — 海鸥、水母、狮子等200余种生物研发机器人。“天上飞的、地上跑的、水里游的,我们都研发了仿生机器 人。”相关负责人笑着说。 参展4年,由于每次都会带来仿生机器人,费斯托展台一直是机器人大会人气最高的展区之一,深受小朋友 “水母”机器人又游回来啦费斯托2020年9月4日 — 当水母机器人“放松”时,圆顶就会弯曲起来,就像一个浅碗。当空气被泵入通道层时,结构发生反向弯曲,由“碗”变成平,再变为反向的“盘”,将水向后推出,并推动自身向前推进。在实验测试中,水母机器人 仿生水母机器人:比真水母游得更快|内有动图 哔 2021年11月3日 — 环境和技术是上个月迪拜世界码头大会(WMC)的两大重点主题,对水母机器人(Jellyfishbot)的制造商来说,这当然是一个再合适不过的展示平台,他们号称这个机器人是一个收集码头港口垃圾和油污的 码头水面清洁工!法国公司推出“水母机器人”

我用 ChatGPT,造了一个「水母机器人」 腾讯网
2023年11月10日 — 对于图片 4、5 和 6 ,她给的提示包括:自给自足、生活在海底的未来派电动水母机器人,水或弹性玻璃状材料,形状变换器,技术设计,透视工业设计,临摹风格,电影般的高细节,超细腻,情调调色,白色背景。德国 费斯托公司 最新研制的机器人“空中水母”就与《黑客帝国》中的 机器人 十分相似,它们长着许多触角,里面充满着 氦气,看上去非常漂亮,能像水母漂在海水中一样漂浮在空中。谈及到这款机器人,费斯托公司还研制出另一种机器人——“机器水母”,这是一种能够在水中漂浮着的机器人 空中水母机器人 百度百科2019年3月16日 — 基于仿生水母机器人的机械臂设计与仿真分析 闫兴坤,张 龙 (南京理工大学机械工程学院,南京 ) 摘要:为满足海洋探索及水下侦察的任务需求,设计一种多自由度仿生水母机器人。基于仿生水母机器人的机械臂设计与仿真分析 百度文库打开机器,用一桶水 制作一桶净化好的水 打开净化好的水,一共十瓶,顺便把桶还给你 也可以用机器直接抽水,获得水块(没错是物块) 把过滤器放进机器里面,可以提高机器的效率,每一个提高20% V10 净水抽水机器 MOD下载 七日杀中文网

毫米级多功能水母机器人问世 中国科学院
2019年7月3日 — 研究表明,该机器人能够操控其周围的水流动,完成一系列任务。 游泳机器人具有生物医学和环境应用方面的潜力,而小型的游泳机器人,更是可以到达许多人类及常规器械无法触及的位置。2013年12月4日 — 大学生发明人向记者展示水木机器人 水木机器人设计图中新网哈尔滨12月4日电 (唐晓伟 记者 王舒)透明的塑料外衣,可视的 人民网:哈尔滨工程大学生研制仿生水母机器人2022年11月4日 — 悬停;s3:控制所述电磁驱动重心调节盘的重心偏移,使得所述微型仿水母机器人在水中的姿态发生倾斜;s4 :调控所述微型仿水母机器人在水中的倾斜角度,控制所述微型仿水母机器人在水中沿任意轨迹运动。19作为优选的,一种轨迹可控的 一种轨迹可控的微型仿水母机器人及其控制方法2024年5月30日 — 水下机器人技术 的发展使机器能够在深海和极端环境中工作,为人类探索以前无法到达的领域提供了可能。 最近关于由 人工肌肉驱动的机器人 的研究展示了其在 静音、效率和适应性 方面的优势。 虽然已 CRPS封面文章!浙大李铁风团队无线水下软体机器
.jpg)
轨迹可控的微型水母机器人研制 SJTU
2023年4月17日 — 为解决微型机器人在较小机身尺寸下实现高效轨迹控制的难题,设计并研制了微型仿水母机器人JRT,其由气室、重心调整机构和仿水母推进器三部分组成,尺寸仅为⌀68 cm×53 cm,可通过重心调整机构和仿水母推进器协同控制有效实现水下轨迹可控水下实验验证了机器人JRT沿竖直方向游泳和悬停、水平 2023年4月27日 — 这种运动不仅可以让机器水母在水中前进,还可以在水母周围产生水流,将海底的小颗粒物吸上来,可用于清除珊瑚礁等脆弱海洋环境中的垃圾。 科学家们说,这种机器水母模仿了真正的水母的运动方式,自然界里的水母也是通过拍动来捕捉食物和获取营养物 海洋清洁利器:仿生机器水母不用碰触垃圾就能吸走它们 IT之家2021年8月9日 — 1北航、瑞士联邦理工联手开发了一款“鱿鱼机器人” 据IEEE Spectrum报道,最新消息,在机器人技术领域最有影响力的ICRA国际会议上,来自北京航空航天大学研究团队和瑞士联邦理工学院的两篇仿生机器人论文吸引了科北航“鱿鱼机器人”、德国“水母机器人” 知乎专栏2023年8月30日 — 想要 10 搭建自己的 maimai 机器人?现在就参考开源项目 maibot 吧~ 请开发者打一局 maimai 如何?帮助我们发发电好不好嘛~ 迁移了数据库以加快网站的响应速度及后续开发。如遇任何无法导入成绩或出错的情况,请及时添加讨论群进行反馈。舞萌 DX 中二节奏查分器 DivingFish
CFB石灰石脱硫剂制备——磨机公众号12.8 推送案例(8)53.jpg)
仿生水母机器人SMA驱动技术及试验研究
2016年7月12日 — 仿生水母机器人在水 中通过调节配重块的质量使重力与浮力相等,使仿生水母机器人一直处于悬浮状态,故在动力学分析中,忽略重力与浮力。对于仿生水母机器人,在游动的过程中,在水中主要受到力主要分为四部分:推进力 2020年4月17日 — 该机器人除了可用于军事监视外,未来还可用于水下快速救援、海底探测、资源勘探、水下地形勘测等方面。 相比于传统刚性机器人,软体机器人一般采用可变性较大的柔性材料制成,可以实现大尺度连续变形,并任意改变自身的尺寸和形状。工业之美|仿生界又出黑科技,这是垂直上升速度最快的水母 2024年5月30日 — 水下机器人技术 的发展使机器能够在深海和极端环境中工作,为人类探索以前无法到达的领域提供了可能。 最近关于由 人工肌肉驱动的机器人 的研究展示了其在 静音、效率和适应性 方面的优势。 虽然已经开发了多种用于水下机器人的人工肌肉,但其实际应用仍受限于如 缆线供电系统、结构不 CRPS封面文章!浙大李铁风团队无线水下软体机器人 百家号2019年7月2日 — 研究表明,该机器人能够操控其周围的水流动,完成一系列任务。 图1:受水母启发的微型机器人的设计及游泳行为 图源:Ren等 游泳机器人具有生物 多功能水母机器人 《自然通讯》 科学网

华侨大学研发的仿生水母机器人在厦门海洋科技成果转化洽谈
2023年11月14日 — 这款仿生水母机器人利用不同的运动控制策略实现水母机器人的半潜和全潜游动,实现在海洋牧场中的低能耗、长时间巡航。 集成多种海洋生态监测传感器于水母机器人上,发展多传感器信号交叉干扰抑制技术,优化水母机器人的巡航轨迹,可以灵活自如地对海洋牧场的养殖环境进行监测。